
전 세계적으로 재생에너지 수요가 증가함에 따라 태양광 발전은 중국의 새로운 에너지 시스템에서 중요한 부분을 차지하게 되었습니다. 그러나 태양광 패널은 장시간 실외에 노출되어 먼지, 기름, 새 배설물 등의 오염 물질이 축적되기 쉬우며, 이는 발전 효율에 심각한 영향을 미칩니다. 기존의 수작업 청소는 비효율적이고 비용이 많이 들 뿐만 아니라 고소 작업으로 인한 안전상의 위험도 있습니다. 이러한 이유로 점점 더 많은 태양광 발전소에서 자동화된 청소를 위해 태양광 청소 로봇을 도입하고 있습니다.

안닐테는 17° 경사면에서도 안정적으로 작동하여 효율적인 청소를 보장하는 태양광 패널 청소 로봇 크롤러를 개발했습니다.

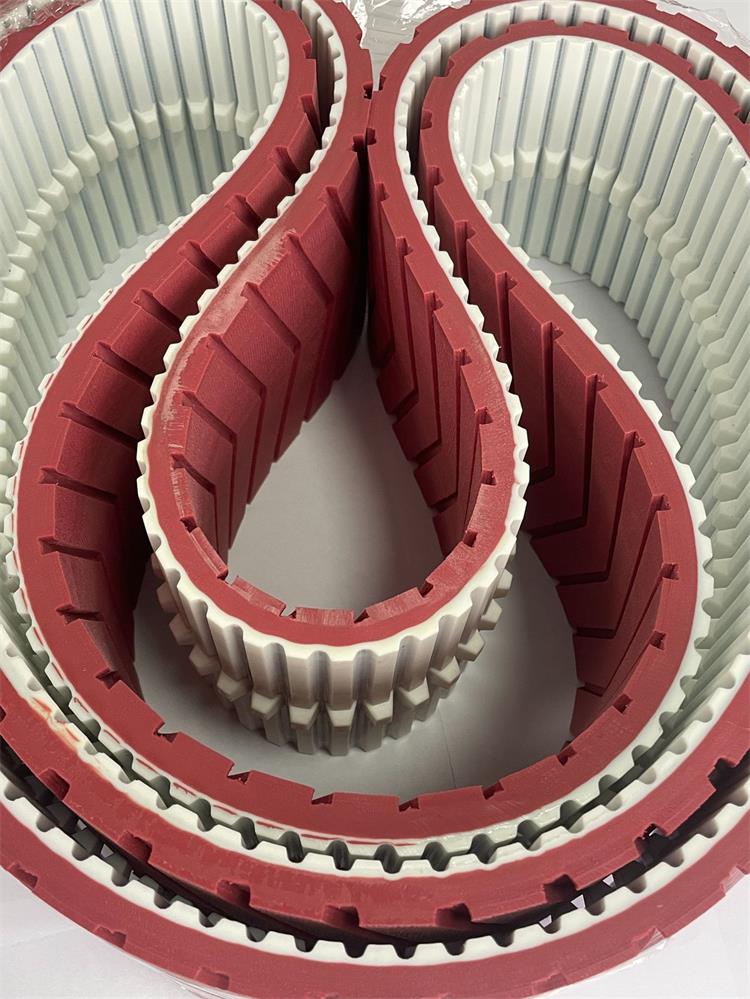
태양광 청소 로봇 트랙의 역할
이 트랙은 태양광 발전 시스템 청소 로봇을 위해 특별히 설계되었으며 다음과 같은 특징을 가지고 있습니다.
강력한 미끄럼 방지: 특수 패턴 디자인으로 마찰력을 높여 로봇의 미끄러짐을 방지하고 안전한 작동을 보장합니다.
적합한 착용감: 태양광 패널과의 접촉 면적을 늘려 세척 효과를 향상시킵니다.
안정적이고 내구성 뛰어남: 다양한 지형에 적응하여 장기간 안정적인 작동을 보장합니다.
태양광 청소 로봇 트랙의 핵심 장점
1. 뛰어난 미끄럼 방지 성능
특수 미끄럼 방지 패턴 디자인으로 강력한 접지력을 제공하며, 미끄러지거나 흔들리지 않고 17° 경사면도 쉽게 오를 수 있습니다.
2. 뛰어난 내마모성
고강도 소재를 채택하여 장기간 사용 시 마모가 적고, 표면 박리나 블록 탈락 등의 문제를 방지합니다.
3. 뛰어난 내후성
자외선, 고온 및 저온에 강하며, 춥거나 덥거나 상관없이 성능이 항상 안정적입니다.
4. 견고한 구조
고무 시트와 동기 벨트가 단단히 결합되어 박리가 쉽지 않으며, 변형 없이 장기간 사용할 수 있도록 보장합니다.
태양광 청소 로봇 트랙의 적용 시나리오

Annilte PV 청소 로봇 트랙은 다음과 같은 다양한 태양광 발전소 시나리오에 적용할 수 있습니다.
농업용 태양광 발전
옥상 및 온실 태양광 발전
산악 태양광 발전
양어장 태양광 발전
공장 태양광 발전
고적상 태양광 발전

연구 개발팀
안닐테는 35명의 기술자로 구성된 연구 개발팀을 보유하고 있습니다. 강력한 기술 연구 개발 역량을 바탕으로 1,780개 산업 분야에 컨베이어 벨트 맞춤 제작 서비스를 제공해 왔으며, 2만 명 이상의 고객으로부터 인정과 신뢰를 얻었습니다. 풍부한 연구 개발 및 맞춤 제작 경험을 통해 다양한 산업 분야의 여러 시나리오에 맞는 맞춤형 솔루션을 제공할 수 있습니다.

생산력
안닐테는 통합 작업장에 독일에서 수입한 완전 자동화 생산 라인 16개와 비상시를 대비한 예비 생산 라인 2개를 보유하고 있습니다. 모든 종류의 원자재를 40만 제곱미터 이상 안전하게 재고로 확보하고 있으며, 고객의 긴급 주문 접수 시 24시간 이내에 제품을 출하하여 고객의 요구에 효율적으로 대응합니다.
안닐테입니다컨베이어 벨트저희는 중국에서 15년의 제조 경험과 ISO 품질 인증을 보유한 제조업체입니다. 또한 국제 SGS 인증 골드 등급 제품 제조업체이기도 합니다.
저희는 자사 브랜드로 다양한 맞춤형 벨트 솔루션을 제공합니다.안닐테."
컨베이어 벨트에 대한 추가 정보가 필요하시면 언제든지 문의해 주십시오.
왓츠앱: +86 185 6019 6101 전화/WeC모자: +86 185 6010 2292
E-우편: 391886440@qq.com 웹사이트: https://www.annilte.net/
게시 시간: 2025년 6월 16일